TRASMETTITORI DI LIVELLO RADAR: FUNZIONAMENTO
TECNOLOGIA RADAR: COME FUNZIONA?
Il termine RADAR è generalmente inteso come una metodologia con la quale le onde elettromagnetiche sono utilizzate per rilevare oggetti a distanza e definirne posizione e movimento.
Il termine RADAR è l’acronimo delle parole in lingua inglese Radio Detection And Ranging.
Un sistema completo di misura RADAR è costituito dai seguenti elementi:
- un trasmettitore, con un’antenna
- un percorso di trasmissione
- l’oggetto riflettente
- un ulteriore percorso (generalmente identico al primo)
- un ricevitore con antenna
Possono essere utilizzate due antenne separate, ma generalmente ne viene impiegata una sola sia per la trasmissione che per la ricezione del segnale radar.
Ecco una breve schematizzazione del funzionamento radar:

I TRASMETTITORI DI LIVELLO RADAR
I trasmettitori di livello radar sono dispositivi utilizzati principalmente per misurare il livello di un liquido o di un solido in un serbatoio o in un contenitore. Come già anticipato, il principio di funzionamento si basa sull’invio di un segnale radar dal trasmettitore verso la superficie del materiale da misurare e sulla ricezione del segnale riflettuto da questa superficie.
Il trasmettitore invia un impulso di segnale elettromagnetico nella forma di onde radio attraverso l’antenna. Queste onde radio raggiungono la superficie del materiale presente nel contenitore e vengono riflesse verso l’antenna del trasmettitore. La durata tra l’invio del segnale e la ricezione del segnale riflettuto viene misurata in tempo reale e viene utilizzata per determinare il livello del materiale nel serbatoio.
I trasmettitori di livello radar possono essere impiegati con una vasta gamma di materiali e sono particolarmente utili in ambienti industriali in cui è necessario monitorare il livello di liquidi o sostanze solide.
LE DIVERSE METODOLOGIE RADAR
Di seguito sono descritte brevemente le diverse forme del segnale e le differenti caratteristiche dei sistemi radar comunemente utilizzati, abbinati alle diverse esigenze applicative:
- CW (Continuous Wave) radar (Radar a onda continua): questo sistema trasmette un segnale continuo a frequenza costante (f) attraverso l’aria o altro gas. La velocità (v) dell’oggetto in movimento può essere determinata dalla Frequenza Doppler del segnale ricevuto. fD = 2 v f / c, dove c = velocità della luce. Questo è il metodo utilizzato per il controllo della velocità dei veicoli. Tuttavia non possono essere misurate le distanze.
- Pulse radar (Radar a frequenza pulsante): trasmette un segnale radar in impulsi di breve durata. La distanza dell’oggetto è dedotta dal tempo di transito degli impulsi del trasmettitore attraverso l’oggetto riflettente di ritorno al ricevitore. Allo stesso tempo, la velocità può essere calcolata dalla variazione Doppler della frequenza trasmessa.
- FMCW (Frequency Modulated Continuous Wave) radar (Onda continua in modulazione di frequenza): il segnale è presente costantemente, ma la sua frequenza è modulata in modo lineare. La distanza dal soggetto può essere dedotta dal segnale ricevuto.
- Radar a Riflessione: questo metodo misura il potere di riflessione dell’oggetto. Dalla fase di questo coefficiente complesso è possibile determinare la distanza con molti valori in multipli della lunghezza d’onda. La frequenza, per esempio, può essere variata per ottenere la distanza assoluta.
I principali metodi di misura per la rilevazione radar del livello sono quelli in Frequenza Pulsante o Modulata. Di conseguenza, questi due sistemi sono descritti con maggiore precisione nella sezione a seguire.
RADAR A FREQUENZA PULSANTE
Principio di misura
Il principio di funzionamento di questo radar è molto semplice: un breve pacchetto d’onda trasmesso incontra l’elemento riflettente dopo un tempo t1 = a / c ed è ricevuto al ritorno dopo un tempo totale t2 = 2a / c.
La differenza di questo sistema consiste nell’ottenere una misura accurata nel tempo t2, poiché per una precisione di 1mm di distanza misurata, è richiesta una precisione dell’ordine di 6 ps di tempo.
(ps = picosecondo, pari a un millesimo di miliardesimo di secondo, cioè ad un millesimo di nanosecondo; è formata usando il prefisso standard pico-, che che significa 10-12)
Il pulse radar è in grado di misurare il livello del liquido in tempo reale, con elevata precisione e sensibilità anche in presenza di schiuma, vapori o depositi che potrebbero interferire con altre tecnologie di misurazione del livello.

FMCW – FREQUENCY MODULATED CONTINUOUS WAVE
Principio di misura
Un segnale radar viene emesso tramite un’antenna, riflesso dalla superficie del prodotto e ricevuto dopo un tempo t.
Il principio radar utilizzato è FMCW (Frequency Modulated Continuous Wave).
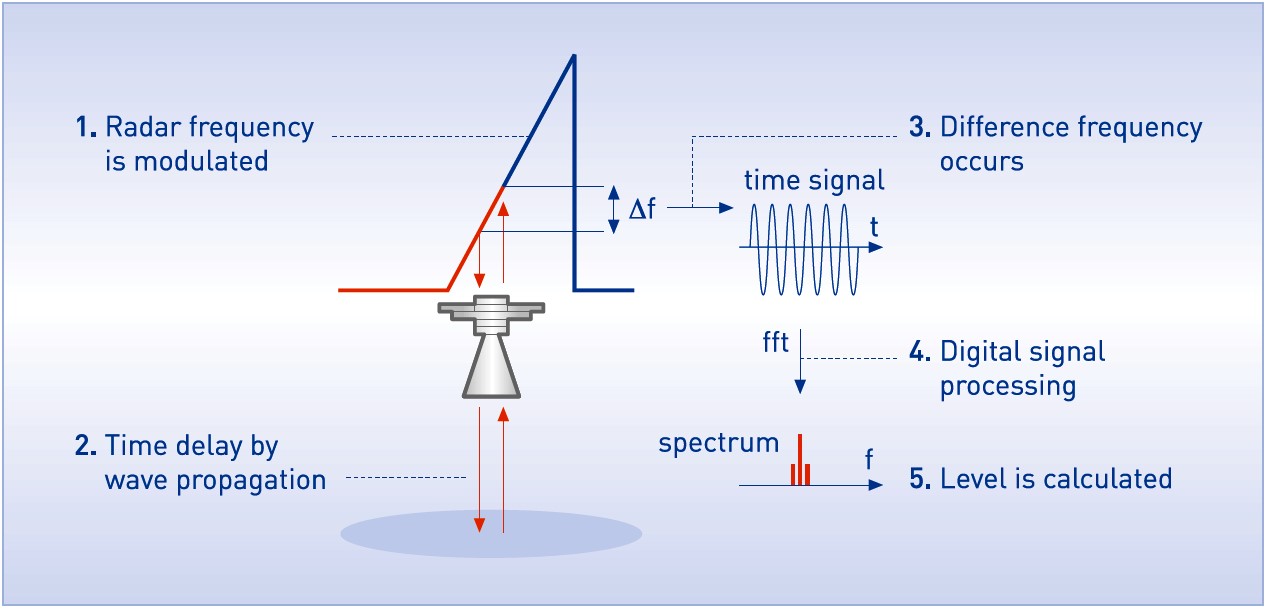
Il radar FMCW trasmette un segnale ad alta frequenza, che aumenta linearmente durante la fase di misurazione (chiamata sweep di frequenza).
Il segnale viene emesso, riflesso sulla superficie di misura e ricevuto con un ritardo di tempo, t. Tempo di ritardo, t = 2d / c, dove d è la distanza dalla superficie del prodotto e c è la velocità della luce nel gas al di sopra del prodotto.
Per un’ulteriore elaborazione del segnale, la differenza Δf viene calcolata dalla frequenza effettiva trasmessa e dalla frequenza ricevuta. La differenza è direttamente proporzionale alla distanza.
Una grande differenza di frequenza corrisponde a una grande distanza e viceversa.
La differenza di frequenza Δf viene trasformata tramite una trasformata di Fourier veloce (FFT) in uno spettro di frequenza e quindi la distanza viene calcolata dallo spettro.
Il livello risulta dalla differenza tra l’altezza del serbatoio e la distanza misurata.
MODALITÀ DI MISURAZIONE
Modalità “Diretta”
Se la costante dielettrica del liquido è alta (εr ≥1,4), il segnale di livello è dato dal riflesso sulla superficie del liquido.
Modalità “TBF Auto”
Se la costante dielettrica del liquido è bassa (εr 1.4…1.5, per la misurazione a lunga distanza), è necessario utilizzare la modalità “TBF Auto” per misurare il livello correttamente.
“TBF Auto” è una modalità automatica che consente al dispositivo di effettuare una selezione tra la modalità “Direct” e la modalità “TBF”.
Se il dispositivo rileva una grande riflessione radar “sopra la zona inferiore del serbatoio“ (il 20% inferiore dell’altezza del serbatoio), il dispositivo utilizzerà la modalità “Diretta”.
Se il dispositivo rileva una grande riflessione radar “nell’area inferiore del serbatoio”, il dispositivo utilizza la modalità TBF.
Questa modalità può essere utilizzata solo in serbatoi con fondo piatto o in pozzetti di calma con piastra di riferimento sul fondo.

Modalità “Full TBF”
TBF = Tank Bottom Following. Se la costante dielettrica del liquido è molto bassa (εr <1,4), è necessario utilizzare la modalità “TBF Full” per misurare il livello correttamente. Il dispositivo utilizza la riflessione radar sul fondo del serbatoio (il segnale passa attraverso il liquido). Questa modalità può essere utilizzata solo in serbatoi con fondo piatto o in pozzetti di calma con piastra di riferimento sul fondo.
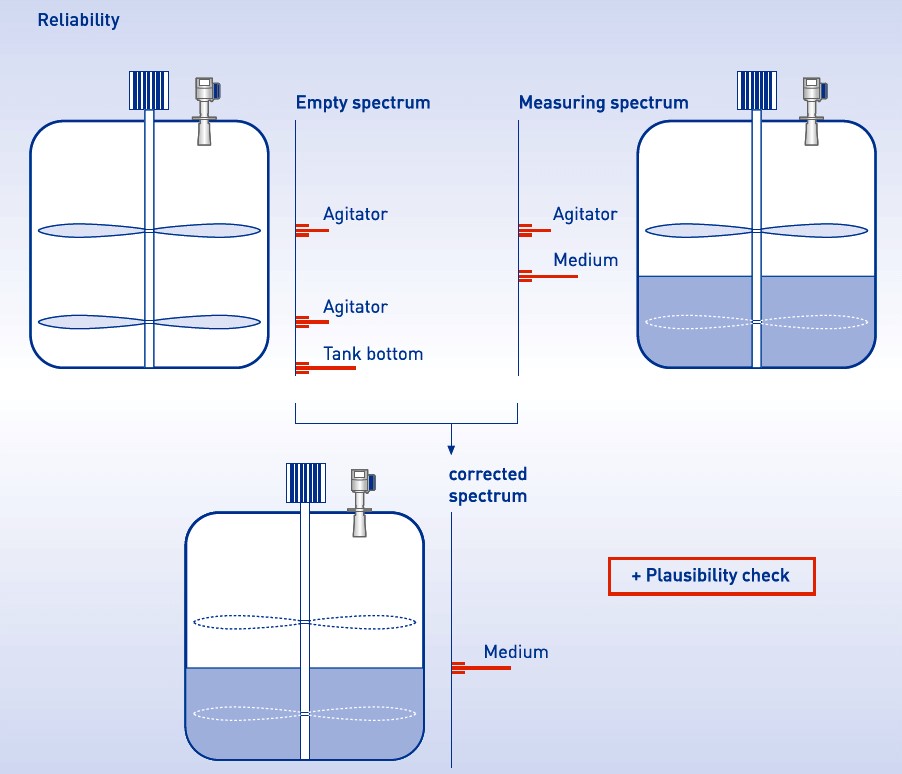
FUNZIONE DI SPETTRO A VUOTO
Tutti i riflessi di interferenza – causati da parti interne del serbatoio fisse o mobili, oppure dal fondo del serbatoio – possono essere rilevati e memorizzati, al fine di registrare uno spettro a vuoto del serbatoio.
Le riflessioni della superfice del liquido vengono rilevate in modo affidabile, distinte dalle riflessioni di interferenza e analizzate confrontando lo spettro vuoto con le riflessioni nello stato pieno.
Per applicazioni su serbatoi che non possono essere svuotati al momento dell’avviamento, i misuratori radar offrono anche la capacità di registrare uno spettro parzialmente vuoto.